食品安全事件意外頻傳,減少食物遭受污染問題最好的做法,除了避免生產過程有過多人工接觸,同時讓製造流程標準化、自動化,才能安全控管流程。未來食品生產線將看不到穿戴口罩人員,改由一連串蜘蛛型機器人,敏捷地夾取食材、辨識類型、分類、排列,最後將食品包裝完成。
上銀科技表示,食品加工因為最終產品要讓人食用,因此在自動化設備細節與傳統工業領域有部分差異,例如生產機台會直接接觸食品,但金屬難免會有氧化現象,因此可能接觸食物構造,必須使用安全無虞材料例如不銹鋼等,機件潤滑油也需要使用無毒性食品級潤滑油,同時以玻璃隔離外界,避免操作過程汙染食品。
在工業現場常看到串聯式多關節連結機器人,外觀比較像是人類的手臂,因此被外界稱為機械手臂,它的機構適合使用於工作環境中在三維空間內快速運動,其構造也適合負重,因此被常拿來用在工業現場設備組裝。
反之,Delta機器人屬於關節連結機器人,其結構透過多個平行移動的機械臂連接到同一支撐控制點,而非像人手般的串聯,因此機械臂的位移來,可營造二維平面空間快速運動效果,在食品加工業中,沒有太多上下Z軸移動需求,反之有較多平行移動,因此該型機器人大量在此領域應用。
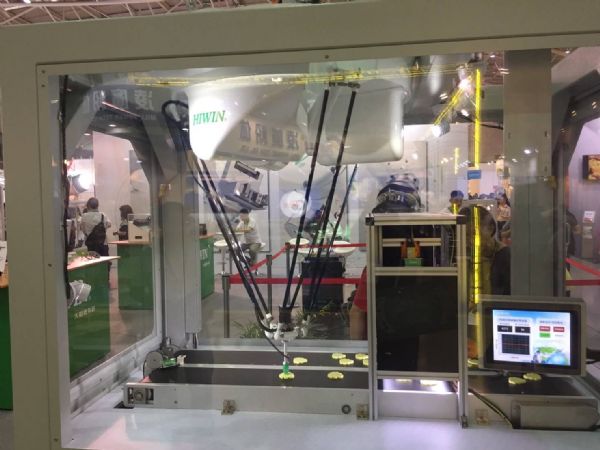
上銀於台北食品設備展展出針對各種食品加工自動化應用,其中在高速輸送生產線中,使用並聯式機械手臂,其構造以仿生式蜘蛛型機械結構,正式名稱為Delta機器人。共有4軸關節構造,其動作有如同蜘蛛一樣快速,可活動半徑達到1.3公尺半徑,業者可依照抓取物品類型,使用夾爪或吸盤,整套系統目前可串聯9台Delta機器人共同協作。
Delta機器人能快速移動與辨識,並將混亂進料排列整齊,因為其搭配機器視覺,可落實動態追蹤系統,在輸送帶源頭以單鏡頭相機抓取影像,依照生產線食物種類、顏色進行辨識、分類、整列,系統會配合輸送帶速度,當物體進入作業範圍內,依設定值抓取、置放,全程避免人工接觸造成汙染,同時也減少檢測疲勞問題。
3D機械視覺特性適合輸送帶上不同大小深度雜亂物件辨識與夾取,透過3D機械視覺可讓系統掌握物品三維點雲圖,協助手臂正確無誤夾取物件;上銀表示,3D視覺最重要的是物件辨識與精準夾取,目前已在研發階段,大約第3季可以推出。
Delta機器人可營造平面快速運動效果,因此大量應用在食品加工業領域。劉尚昀